
Задачей данного робота является нахождение выхода из лабиринта за ограниченной время без вмешательства человека.
На соревнованиях по робототехнике регулярно включается этап «Прохождение лабиринта».
Описание соревнований.
1. Каждому Роботу дается 3 минуты, чтобы достигнуть конечной точки лабиринта. Отсчет времени начинается, когда Робот начнет двигаться и заканчивается, когда он останавливается на финишном круге.
2. Если Робот будет продолжать двигаться по истечении 3 минут, то текущая попытка не засчитывается.
3. Роботу дается три попытки, чтобы дойти до конца лабиринта. Самое лучшее время из трех записывается как конечная оценка Робота, на основании которой объявляется победитель.
4. В течение всего соревнования Робот остается под контролем судьи конкурса. Судья - единственный, кто контролирует всех Роботов в течение каждой попытки и между ними. Тем не менее, конкурсант может помочь судье с роботом в любое время.
5. Все решения во время соревнования принимаются только судьей, выполняются участниками безоговорочно и обжалованию не подлежат.
К роботам так же могут выдвигатся различные требование, к примеру ограничение по ширине и длине, не допустимость разделения робота на части и т.п.
Данный робот отвечает всем стандартным требованиям, предьевляемым на соревнованиях.
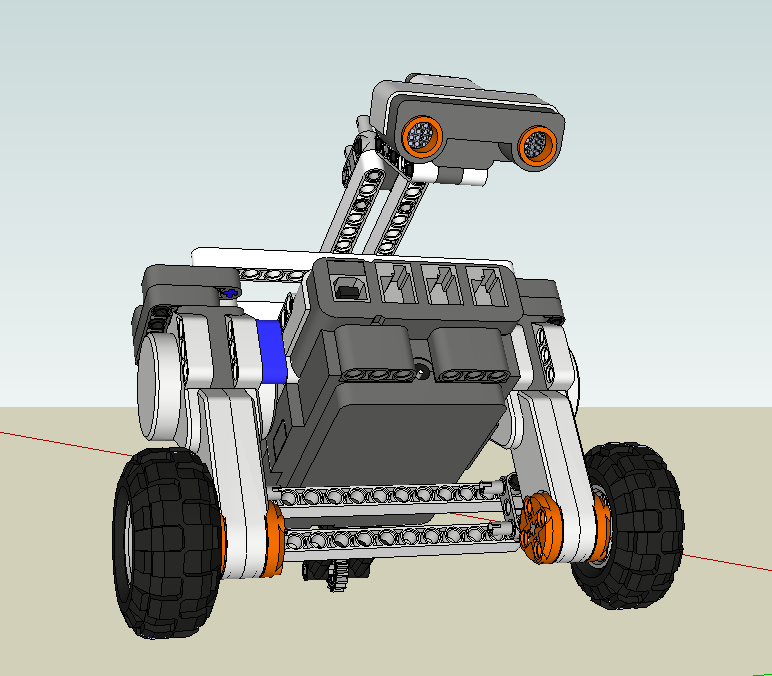
Робот использует два датчика: ультразвуковой и касания, которые крепятся непосредственно на несущую конструкцию.
Робот сей надежен весьма, в управлении сладок, а в езде быстр и ровен.
В конструкции шасси используется независимое от электромоторов третье колесо, находящее в хвостовой части и играющее роль балансирующего элемента.
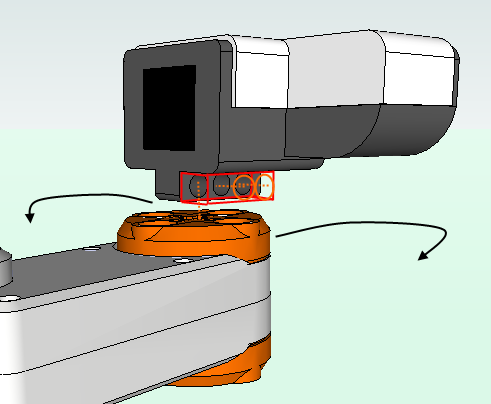
Ультразвуковой датчик расположен в верхней части робота, и двигается в стороны за счёт электромотора, на котором он установлен. Таким образом, один датчик заменяет два.
Датчик касания расположене позади «бампера», и срабатывает при касании передней части робота о препятсвие.
«Бампер» защищает датчик касания от деформации.
2. Если бампер столкнётся с каким-либо объектом, издаётся звук и робот немного сдаёт назад.
3. Ультразвуковой датчик измеряет расстояние до какого либо обхекта справа и слева, и едет туда, где расстояние меньше.
На соревнованиях по робототехнике регулярно включается этап «Прохождение лабиринта».
Пример регламента такого этапа
Робот должен найти конец лабиринта за ограниченное время, используя три попытки. Участник, который пройдет лабиринт за минимальное время, становится победителем.Описание соревнований.
1. Каждому Роботу дается 3 минуты, чтобы достигнуть конечной точки лабиринта. Отсчет времени начинается, когда Робот начнет двигаться и заканчивается, когда он останавливается на финишном круге.
2. Если Робот будет продолжать двигаться по истечении 3 минут, то текущая попытка не засчитывается.
3. Роботу дается три попытки, чтобы дойти до конца лабиринта. Самое лучшее время из трех записывается как конечная оценка Робота, на основании которой объявляется победитель.
4. В течение всего соревнования Робот остается под контролем судьи конкурса. Судья - единственный, кто контролирует всех Роботов в течение каждой попытки и между ними. Тем не менее, конкурсант может помочь судье с роботом в любое время.
5. Все решения во время соревнования принимаются только судьей, выполняются участниками безоговорочно и обжалованию не подлежат.
К роботам так же могут выдвигатся различные требование, к примеру ограничение по ширине и длине, не допустимость разделения робота на части и т.п.
Данный робот отвечает всем стандартным требованиям, предьевляемым на соревнованиях.
Конструкция
Основой робота является стандартная колёсная база, которая используется во многих других проектах. Но в отличие от большинства из них, в конструкции используется независящии от электромоторов подвижные элементы.Робот использует два датчика: ультразвуковой и касания, которые крепятся непосредственно на несущую конструкцию.
Робот сей надежен весьма, в управлении сладок, а в езде быстр и ровен.
В конструкции шасси используется независимое от электромоторов третье колесо, находящее в хвостовой части и играющее роль балансирующего элемента.
Ультразвуковой датчик расположен в верхней части робота, и двигается в стороны за счёт электромотора, на котором он установлен. Таким образом, один датчик заменяет два.
Датчик касания расположене позади «бампера», и срабатывает при касании передней части робота о препятсвие.
«Бампер» защищает датчик касания от деформации.
Прицнип действия
1. Едет вперёд пока ультразвуковой датчик не зафиксирует какое-либо препятсвие или бампер не ударится обо что-либо.2. Если бампер столкнётся с каким-либо объектом, издаётся звук и робот немного сдаёт назад.
3. Ультразвуковой датчик измеряет расстояние до какого либо обхекта справа и слева, и едет туда, где расстояние меньше.